4.2ˇŇĂËÁŘąŔŇľ ( Rotation)
ˇŇĂËÁŘąŔŇľŕ»çąˇŇĂá»Ĺ§ĂŮ»·Őč¨ĐµéͧˇÓËą´ÇčҨش㴨ش˹Öč§ŕ»çą¨Ř´ËÁŘą
(pivot
point) ŕĘÁÍ ËĹѧ¨ŇˇËÁŘąŔŇľä»áĹéÇ
ĂĐÂĐËčҧĂĐËÇčҧ¨Ř´ËÁŘąˇŃşŔŇľ¨ĐÂѧ¤§ÁŐ¤čŇŕ·čŇŕ´ÔÁ ĂŮ»Ăčҧ
ĹѡɳТͧŔŇľˇçÂѧ¤§ŕ´ÔÁ áµčŔŇľ¨ĐÁŐˇŇèѴÇҧ·Őčµčҧ仨ҡŕ´ÔÁ
ŕą×čͧÁҨҡˇŇĂËÁŘąąŃčąŕͧ
ˇŇĂËÁŘąŔŇľÍҨ¨ĐËÁŘą·ŐĹĐËĹŇ ćŔŇľˇçä´é
¨ĐËÁŘą·Çąŕ˘çÁąŇĚÔˇŇ(¤čŇÁŘÁŕ»çąşÇˇ) ËĂ×Í ËÁŘąµŇÁŕ˘çÁąŇĚԡҡçä´é(¤čŇÁŘÁŕ»çąĹş)
áĹШشËÁŘą·ŐčăŞéÍҨ¨ĐÍÂŮčŔŇÂăąŔŇľËĂ×ÍŔŇ¹͡ŔŇľˇçä´é
ˇŇĂÍéҧ¶Ö§¨Ř´ľÔˇŃ´ (X,Y) ąŃéą ąÍˇ¨Ňˇ¨ĐăŞéĂĐşşľÔˇŃ´©ŇˇáĹéÇ
ÍҨ¨ĐăŞéĂĐşşľÔˇŃ´ Polar (ˇŇú͡µÓá˹觨شâ´ÂăŞé Vector
) ˇçä´é «Ö觷Ńé§ĘͧĂĐşşÁŐ¤ÇŇÁĘŃÁľŃą¸ěˇŃą´Ń§ąŐé
X
= rcosf
Y
= rsinf
¶éŇ(X,Y) ¶ŮˇËÁع仨ҡŕ´ÔÁŕ»çąÁŘÁ q
ăą·Ôȷҧ·Çąŕ˘çÁąŇĚԡҨĐä´é¨Ř´ăËÁč¤×Í (X’,Y’) ´Ń§ĂŮ»
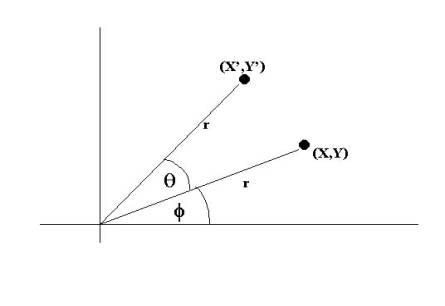
¨Đä´é
X’
= rcos(f+q) = rcosfcosq - rsinfsinq
Y’
= rsin(f+q) = rsinfcosq + rcosfsinq
á·ą¤čŇ rcosf ´éÇ X
áĹĐ rsinf ´éÇ Y
¨Đä´é
X’
= Xcosq - Ysinq
Y’
= Ycosq + Xsinq
ĘÁˇŇĂ·Őčä´éąŐé¤×Í ĘÁˇŇĂ·ŐčăŞéá»Ĺ§¤čҾԡѴ¨Ňˇ¨Ř´ (X,Y) ä»ŕ»çą¨Ř´ăËÁč (X’,Y’) â´ÂˇŇĂËÁŘąĂÍş¨Ř´ˇÓŕąÔ´ä»ŕ»çąÁŘÁ
q ·Ôȷҧ·Çąŕ˘çÁąŇĚÔˇŇ
ˇŇĂËÁŘąŔŇľ·Óä´éâ´ÂˇŇĂá»Ĺ§¤čҾԡѴ¨Ř´·Řˇ¨Ř´·ŐčăŞéąÔÂŇÁŔŇľąŃéąä»ŕ»çąľÔˇŃ´ăËÁčâ´ÂăŞéĘÁˇŇâéҧµéąáĹéǤčÍÂÇŇ´ŔŇľŕ´ÔÁ·Őč¨Ř´ľÔˇŃ´ăËÁčąŃéą
¨ŇˇĘÁˇŇáŇĂËÁŘąŔŇľ´Ń§ˇĹčŇÇ ĘŇÁŇŕ˘ŐÂąăąĂٻẺ˘Í§ Matrix ä´é´Ń§ąŐé
![]()
![]() cosq sinq 0
cosq sinq 0
[
X’ Y’ 1] = [
X Y
1] -sinq cosq 0
0 0 1
![]()
![]() cosq sinq 0
cosq sinq 0
ŕĂŐ¡ -sinq cosq 0 ÇčŇ “Transformation Matrix ĘÓËĂŃşˇŇĂËÁŘą”
0 0 1
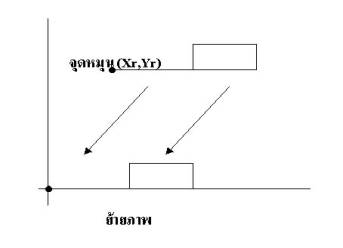
㹷ҧ»ŻÔşŃµÔŕĂŇÍҨ¨ĐµéͧËÁŘąŔŇľĂÍş¨Ř´ă´ ć «Öč§äÁčăŞč¨Ř´ˇÓŕąÔ´
ĘÓËĂŃşˇĂłŐąŐé¨ĐµéͧăŞé 3 ˘Ń鹵͹ ´Ń§ąŐé
1.
ÂéҨشËÁŘą (Xr,Yr)ä»Âѧ¨Ř´ˇÓŕąÔ´ (0,0)
â´ÂąÓ Transformation Matrix ĘÓËĂŃşˇŇĂÂéŇÂÁҤٳˇŃş¨Ř´·Řˇ¨Ř´
áĹĐăËé Tx = -Xr áĹĐ Ty = -Yr ŕÁ×čÍÂéŇÂáĹéÇ ·Řˇ¨Ř´(X,Y) ·ŐčăŞéąÔÂŇÁŔŇľˇç¨Đ¶ŮˇÂéŇÂä»Âѧ¨Ř´ăËÁč (X’,Y’)
´éÇÂ
![]()
![]() 1 0 0
1 0 0
[
X’ Y’ 1] = [ X Y 1] 0 1 0
-Xr -Yr 1
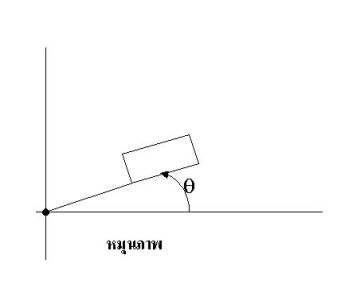
2.
·ÓˇŇĂËÁŘąŔŇľĂÍş¨Ř´ˇÓŕąÔ´(0,0) ŕ»çąÁŘÁ q ·Óä´éâ´ÂˇŇĂąÓ Transformation Matrix ĘÓËĂŃşˇŇĂËÁŘąÁҤٳˇŃş¨Ř´·Řˇ¨Ř´·Őčä´é¨Ňˇ˘éÍ 1 ä´é¨Ř´ăËÁčŕ»çą (X”,Y”)
![]()
![]() cosq sinq 0
cosq sinq 0
[
X” Y” 1] = [
X’ Y’
1] -sinq cosq 0
0 0 1
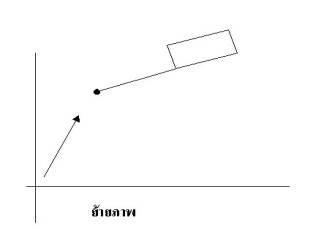
3.
ÂéҨشËÁŘą¨Ňˇ¨Ř´ˇÓŕąÔ´(0,0) ˇĹŃşä»Âѧ¨Ř´ŕ´ÔÁ (Xr,Yr)
¨Đä´é¨Ř´ăËÁč˘Í§·Řˇ¨Ř´·ŐčąÔÂŇÁŔŇľŕ»çą (X*,Y*)
![]()
![]() 1 0 0
1 0 0
[
X* Y* 1] = [ X” Y” 1] 0 1 0
Xr Yr 1
¨Ňˇ 3 ˘Ń鹵͹˘éҧµéąŕĂŇÍҨËҨشăËÁčâ´ÂˇŇĂ»ĂĐÂءµě´Ń§ąŐé ¤×Í ąÓ Transformation
Matrix ÁҤٳˇŃąˇčÍą
![]()
![]()
![]()
![]()
![]()
![]() 1 0 0 cosq sinq 0 1 0 0
1 0 0 cosq sinq 0 1 0 0
0 1 0 -sinq cosq 0 0 1 0
-Xr -Yr 1 0 0 1 Xr Yr 1
![]() cosq sinq 0
cosq sinq 0
![]() = -sinq cosq 0
= -sinq cosq 0
(1-
cosq)Xr + Yrsinq (1-cosq)Yr - Xrsinq 1
¨ŇˇąŃéąąÓ Transformation Matrix ăËÁč·Őčä´éÁҤٳˇŃş¨Ř´·Řˇ¨Ř´·ŐčąÔÂŇÁŔŇľ
![]()
![]()
cosq sinq 0
[X’ Y’ 1] = [X Y 1]
-sinq cosq 0
(1-
cosq)Xr + Yrsinq (1-cosq)Yr - Xrsinq 1
ˇç¨Đä´éŔŇľ·Őč¶ŮˇËÁŘąµŇÁµéͧˇŇĂ ·Ń駹Őéµéͧ¤Ůł Transformation
Matrix µŇÁĹÓ´Ńş˘Ń鹵͹˘Í§ˇŇĂ Transform ŕą×čͧ¨Ňˇ¶éҤٳĽÔ´ĹÓ´ŃşËĂ×ÍĘĹŃşˇŃąáĹéÇŔŇľ·Őčä´éˇç¨ĐĽÔ´ä»¨Ňˇ¤ÇŇÁŕ»çą¨ĂÔ§