บทที่ 6 เส้นโค้ง(Curve)
ในการลากเส้นนั้นเรามีวิธีการลากเส้นอยู่ 2 แบบ คือ
1.
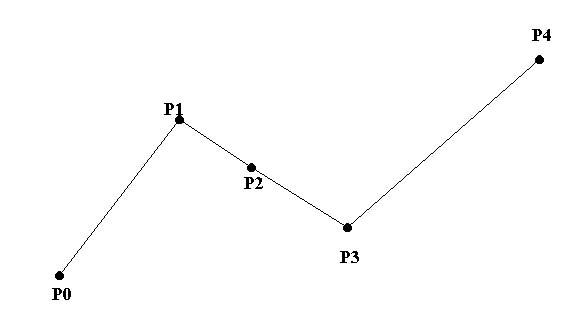
Interpolation
เป็นการลากเส้นแบบลากเส้นตรงเชื่อมจุดทุกจุดดังรูป
2.
Approximation
เป็นการประมาณค่าจุดต่อไปโดยใช้จุดรอบ ๆข้าง ดังรูป
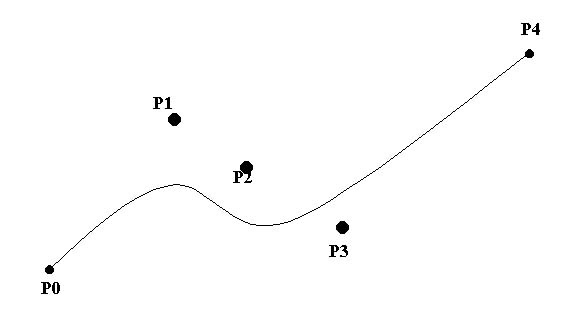
ซึ่ง Approximation จะนำไปสู่การวาดเส้นโค้ง
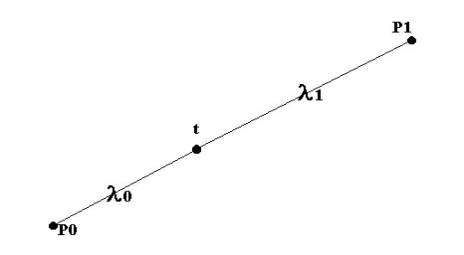
l0*P0 + l1*P1 =
P (1)
l0 = 1 - l1 (2)
ถ้า l1 =
t (3)
แทนค่า (2) ใน (1) (1
- l1)*P0 + l1*P1 = P (4)
แทนค่า (3) ใน (4) (1
– t )*P0 + t*P1 = P
ดังนั้น P(x,y) = (1 - t)*P0 + t*P1
จากวิธีการดังกล่าวได้มีการนำมาประยุกต์เป็น Algorithm สำหรับการลากเส้นโค้งโดยในที่นี้เราจะกล่าวถึงเพียง Algorithm เดียว คือ Bezier Curve Algorithm
Curve
3 Control point
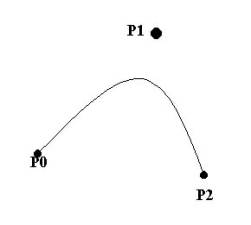
P(x,y) = (1 - u)*P0 + 2*u*(1-u)*P1 + u2*P2
Curve 4 Control point
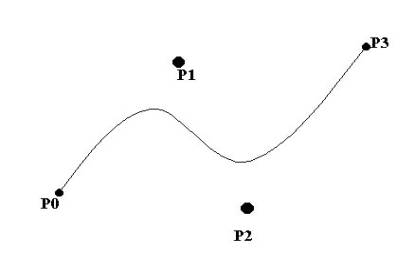
P(x,y) = (1 - u)3*P0 + 3*u*(1-u)2*P1
+ 3*u2*(1 - u)*P2 + u3*P3
Curve n + 1 Control point
n
P(u) = S Bk,n(u) Pk
k
= 0
Bk,n(u)
= C(n,k) uk ( 1 - u )n-k
C(n,k) = n! / (k! ( n - k )!)
โดย u คือ ระยะห่างของจุดที่ต้องการจะ plot ภายใน control point
Bezier
Curve Algorithm 3 control point
|
Void Bezier(int cpx, int cpy, int N, int *x, int *y) { Du
= 1/N; u
= 0 ; for(int
I = 1; I < = N ; I++) { w
= 1- u; B0z
= w*w; B1z
= 2*u*w; B2z
= u*u; x[I]
= (B0z*cpx[1]) + (B1z*cpx[2]) +
(B2z*cpx[3]); y[I]
= (B0z*cpy[1]) + (B1z*cpy[2]) +
(B2z*cpy[3]); u
= u + Du; } } |